evodemon
-
Posts
3 -
Joined
-
Last visited
evodemon's Achievements
")
Newbie (1/14)
0
Reputation
-
World frame of reference issue
evodemon replied to evodemon's topic in FSUIPC Support Pete Dowson Modules
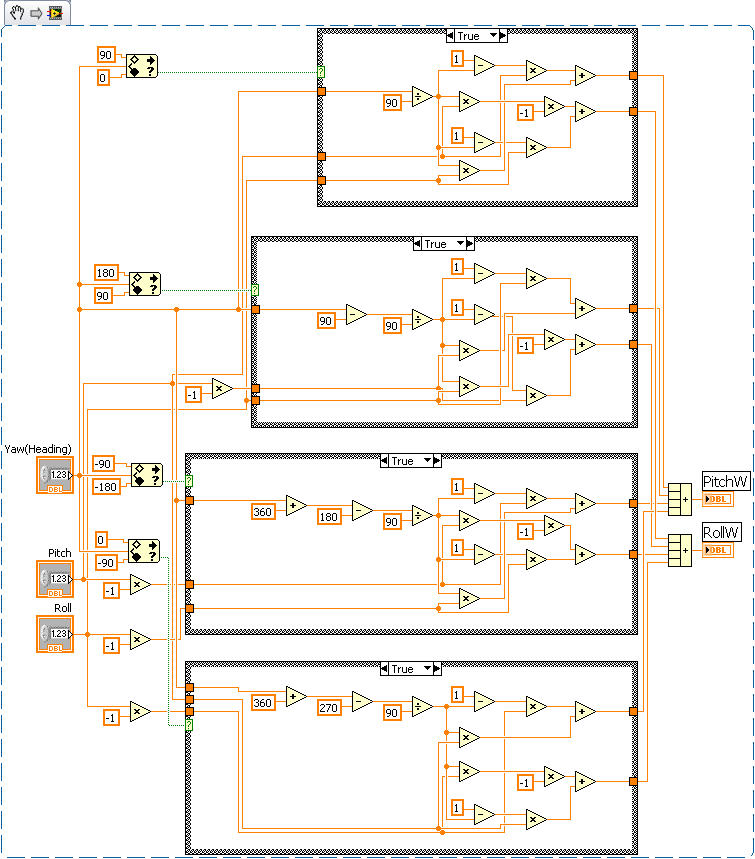
In case anyone needs what I've described above (current pitch/roll in the world's frame of reference), I coded a transformation function for it in LabVIEW 9. Given the heading (yaw) of the aircraft, and its current pitch/roll (body frame of reference), it returns the pitch and roll with respect to the world's frame of reference.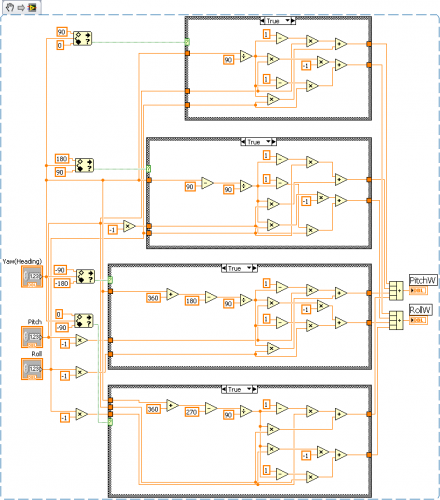
-
World frame of reference issue
evodemon replied to evodemon's topic in FSUIPC Support Pete Dowson Modules
Thanks for info. I see now that its just whatever FS2004 decides to output. I'll probably just do the integration/position tracking myself unless someone else can point me in the right direction :D Thanks -
Hello, I am currently using FSUIPC 3.9.6.0 to pull some values from FS2004. I have been able to get Pitch, Roll, and Yaw velocity (rad/s) in both the body frame of reference (FoR), and from the world frame of reference. These values always appear to be the same though. The world frame of reference velocities don't appear to be any different than the body-FOR velocities. I thought that World-FoR angular velocities would behave like this: -When facing north-south, an aircraft pitch up/down would cause pitch velocity to change. -When facing east-west, an aircraft pitch up/down would cause the ROLL velocity to change. -When facing any other direction, some combination of roll/pitch. Isn't this what the World frame of reference is for? Just for sanity purposes, I am using 0x31A8, 0x31B0, 0x31B8 to get world-FoR angular velocities and 0x30A8, 0x30B0, 0x30B8 to get body-FoR angular velocities. Thanks, Matt