

adnanso
-
Posts
25 -
Joined
-
Last visited
-
Days Won
1
adnanso's Achievements
")





-
Embrace the freedom of casual encounters on the best dating app in town! Legitimate Girls Outstanding Сasual Dating [URL=http://meettomy.site]Exemplary Сasual Dating[/URL]
-
GSX (MSFS): disable Pilots and Crew Boarding animation
adnanso replied to adnanso's topic in User Contributions
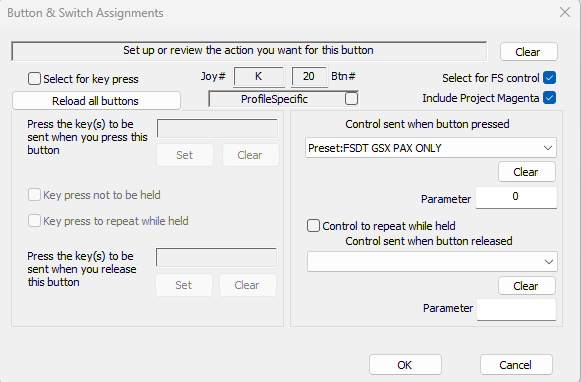
Wow nice addition John! thanks for this is a very handy feature. therefore after the upcoming update, the same key assignment will look like this :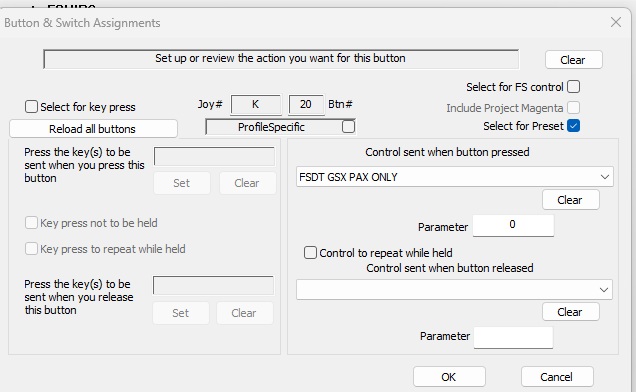
-
Hello everyone, If you like me, want to remove pilots and crew from the boarding process, GSX offers no direct way to do it, but the manual lists LVARS that can be used by third party devs to achieve the same goal, which means, it can be done through FSUIPC : just add the following line to myevents.txt file in FSUIPC folder (create it if it doesn't exist): FSDT_GSX_PAX_ONLY#1 (>L:FSDT_GSX_PILOTS_NOT_DEBOARDING) (SLEEP:100) 1 (>L:FSDT_GSX_CREW_NOT_DEBOARDING) (SLEEP:100) 1 (>L:FSDT_GSX_PILOTS_NOT_BOARDING) (SLEEP:100) 1 (>L:FSDT_GSX_CREW_NOT_BOARDING) then start fsuipc and assign a button -or a key press- as follows : now all you have to do is to press that button just before asking for boarding or deboarding and voilà!
-
just tried it, it does work but the knob movement was inverted, the correct labeling would be : PMDG_B737-7_AUTOBRAKE_DEC#46001 (>K:ROTOR_BRAKE) PMDG_B737-7_AUTOBRAKE_INC#46002 (>K:ROTOR_BRAKE)
-
Extracted PMDG parameters from Linda action.lua, what to do next?
adnanso replied to mtjoeng's topic in FSUIPC7 MSFS
I'v just checked against the XML file and cofirm that your Rotor Brake control parameters are correct😉 ie, I took here a snippet from the VNAV part : left click = (386 + 100) + 1 = 38601 <!-- 386 - VNAV Switch Collins ############################# --> <Component ID="ngx_switch_386_a" Node="ngx_switch_386_a"> <UseTemplate Name="ASOBO_GT_Emissive_Gauge"> <EMISSIVE_CODE>(L:switch_3861_73X, number)</EMISSIVE_CODE> </UseTemplate> <UseTemplate Name="ASOBO_GT_Anim_Code"> <ANIM_NAME>ngx_switch_386_a</ANIM_NAME> <PART_ID>NGX_SWITCH_386_A</PART_ID> <ANIM_LENGTH>100</ANIM_LENGTH> <ANIM_CODE> (L:switch_386_73X, number) </ANIM_CODE> <ANIM_LAG>0</ANIM_LAG> </UseTemplate> <UseTemplate Name="ASOBO_GT_MouseRect"> <TOOLTIPID>VNAV</TOOLTIPID> <MOUSEFLAGS>LeftSingle+RightSingle+Move+LeftRelease+RightRelease+MiddleSingle+WheelUp+WheelDown</MOUSEFLAGS> <CURSOR>Hand</CURSOR> <CALLBACKCODE> 386 100 * (>L:SwitchID, number) (M:Event) 'LeftSingle' scmp 0 == if{ (L:SwitchID, number) 1 + (>L:SwitchID, number) } (M:Event) 'RightSingle' scmp 0 == if{ (L:SwitchID, number) 2 + (>L:SwitchID, number) } (...) the advatage here is that you get also the name and type of the lvar that receives the actual state of the switch L:switch_386_73X, number -
maybe that can help (not tested yet) : PMDG_B737-7_AUTOBRAKE_INC#46001 (>K:ROTOR_BRAKE) PMDG_B737-7_AUTOBRAKE_DEC#46002 (>K:ROTOR_BRAKE) then if you want to read the actual autobrake setting , use this LVAR : (L:switch_460_73X, number) ps: you can find more info in the included file : ...\pmdg-aircraft-737\Documentation\PMDG\PMDG_NG3_VC_700.xml
-
Can I use FSUIPC7 as a bridge from PMDGNG3 to Offset ?
adnanso replied to smoothchat's topic in FSUIPC7 MSFS
I personally use the included file PMDG_NG3_VC_700.xml to locate Lvars and events , everything seems to be listed inside located here : packages\pmdg-aircraft-737\Documentation\PMDG\PMDG_NG3_VC_700.xml -
fuel levers idle/cutoff for the new PMDG 737-700 MSFS
adnanso replied to Cuantreau's topic in FSUIPC7 MSFS
side question please @John Dowson : any direct way to download the file file from the hubhob site instead of using MobiFlight application ? -
fuel levers idle/cutoff for the new PMDG 737-700 MSFS
adnanso replied to Cuantreau's topic in FSUIPC7 MSFS
Nope, suffise to add them correctly to the event.txt file then (re)start FSUIPC, that will make them available with the prefix 'Preset:****" Edit: or simply use the file shared by @John Dowson earlier, it does allready contain these events .. -
fuel levers idle/cutoff for the new PMDG 737-700 MSFS
adnanso replied to Cuantreau's topic in FSUIPC7 MSFS
Hello @Cuantreau I've added the events you are asking for to the Mobiflight Contribution website around the same time you created this topic 😉 PMDG_B737-7_FUEL_CUT_OFF_LEVER1_DN#(L:switch_688_73X) 100 div 0 == if{ 68801 (>K:ROTOR_BRAKE) } PMDG_B737-7_FUEL_CUT_OFF_LEVER1_UP#(L:switch_688_73X) 100 div 1 == if{ 68801 (>K:ROTOR_BRAKE) } PMDG_B737-7_FUEL_CUT_OFF_LEVER2_DN#(L:switch_689_73X) 100 div 0 == if{ 68901 (>K:ROTOR_BRAKE) } PMDG_B737-7_FUEL_CUT_OFF_LEVER2_UP#(L:switch_689_73X) 100 div 1 == if{ 68901 (>K:ROTOR_BRAKE) } just add them to your ...\FSUIPC7\events.txt and voilà ! also, if my undesrtanding is good, they will be automatically included with the next FSUIPC update. -
Hello Guys, Trial key has expired, can you update it please ?
